产品概述
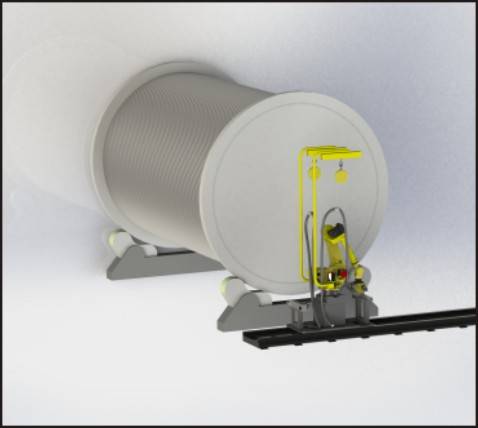
该系列产品主要适用于核(火)电、石化、化工、锅炉及空调等行业,采用智能化、无人化设计理念,创新应用了先进的3D十字激光识别定位技术,精确识别管孔的3维空间位置信息,由6轴机器人执行全位置管板自动焊枪精确定位。可7*24小时连续作业,大大降低了企业对人工技能的过度依赖,为企业节约了大量的人力资源及制造成本。该系列产品配置了日本发那科(FANUC)公司的高精度、大负载、长臂展机器人,可加配外部协同轴,工具快换装置等,实现多机协同流水线作业。
产品适用范围
焊缝形式:角焊缝、平焊缝等
材 质:碳钢、合金钢、不锈钢、钛合金、锆合金等
管子直径:Φ12mm~38mm,Φ38mm~65mm
工作范围:2500mm(工件不旋转情况下)

可选配置
可选3D十字激光识别传感器管径识别范围或特殊定制;
选配其他品牌机器人及外部协同电机,实现多机协同工作;
选配适用于钛合金、锆合金等有色金属焊接的全位置管板焊枪;
选配全自动钨极更换系统及自动更换钨极的全自动焊枪;
其他特殊定制焊枪,管內缩,内孔焊等。
技术特点
标准6轴工业机器人,控制功能强大,运动精度高,柔性化好,支持多种总线通讯,可对接工厂各类数字化管理系统,更符合“中国制造2025”设备要求;
2
通过3D十字激光精确测量,实现机器人与工件相对位置自动调整,对工件摆放位置没有要求;
1
3
4
实现换热器流水线作业,多台机器人系统可柔性组合使用,不仅实用性高,且车间科技感、工业感特别强,给参观工厂的客户带来更多的视觉冲击和震撼;
模块化设计,支持后期升级
机器人焊接系统与胀/平系统任意切换;
增加钨极自动更换系统;
钨极质量自动检测系统,自我判断是否需要更换钨极;
增加视觉质量检测系统,焊后自动检测焊缝质量。
系统工作流程

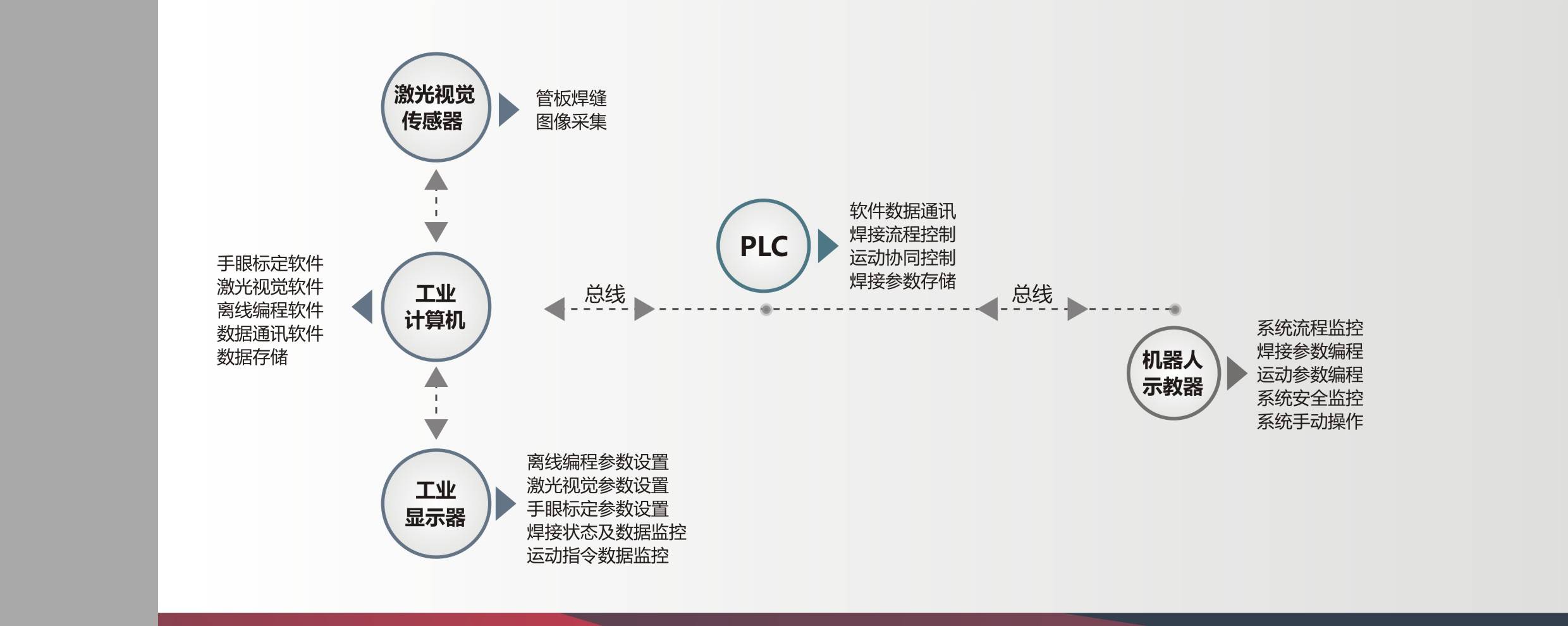
系统控制架构
系统由多个独立子系统组成,各子系统之间通过以太网总线连接,协同控制实现系统全自动工作。
系统软件介绍
软件名称
手眼标定软件
具体功能说明
将机器人的工具坐标系与3D十字激光识别传感器坐标系,建立换算关系
离线编程软件
激光视觉软件
通讯软件
焊接控制软件
数据存储及系统监控软件
将工件管孔CAD图纸导入,通过轨迹规划,自动生成机器人运动轨迹,
将3D十字激光识别传感器采集的信息,经软件运算得到所需的3D数据,并转化为机器人运动轨迹,引导焊枪精确定位
各子系统之间采用TCP/IP、Profinet协议的总线通讯方式连接
整个焊接过程中各参数的设置与流程控制
数据存储:保存空间坐标信息、各软件参数设置、采集的图像及相关数据等
系统监控:主/子系统工作状态、数据通讯状态、焊接进程等
序 号
1
5
4
3
2
6
机器人管板应用场景